SCANSIONI 3D A PUNTI DISCRETI
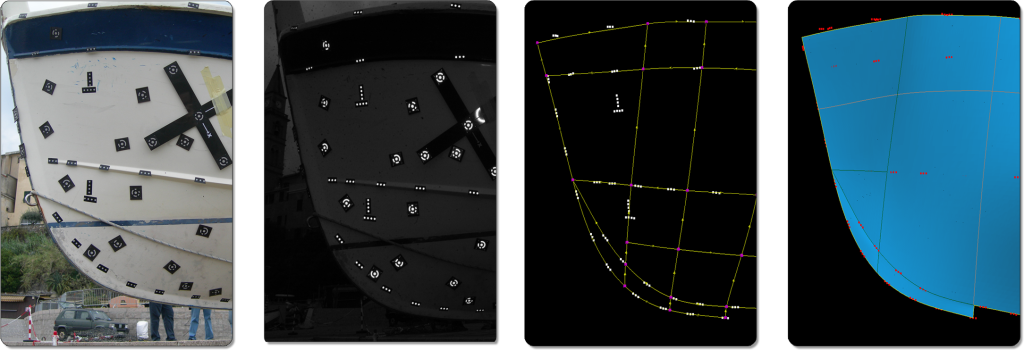
Le scansioni 3D di singoli punti vengono effettuate con sistemi di fotogrammetria “metrologica” che permettono di rilevare con elevata accuratezza il centro di target circolari posizionati sull’oggetto e fotografati da diverse angolazioni.
Tecniche di triangolazione 3D permettono di ottenere la posizione relativa nello spazio di tutti i punti (target) fotografati.
Il formato di uscita standard di una scansione tidimensionale a punti discreti è solitamente un nuvola di punti XYZ.
SCANSIONE TRIDIMENSIONALE A CAMPO INTERO
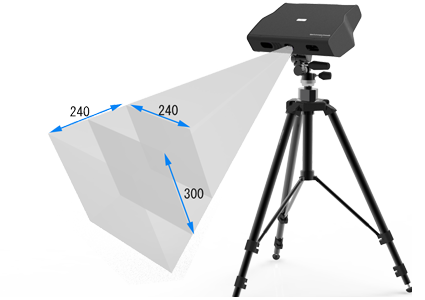
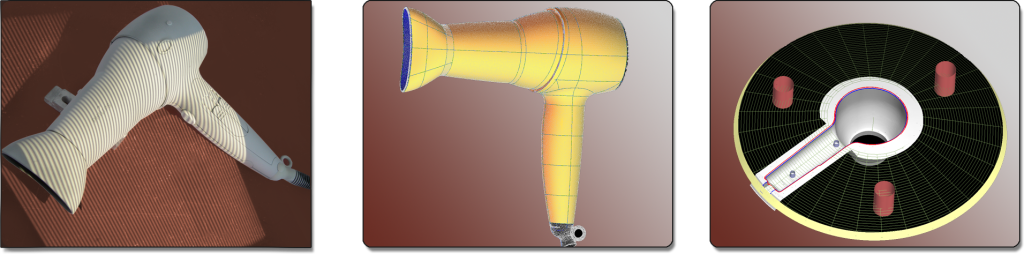
I particolari di piccole-medie dimensioni, dal portachiavi alla maquette di una automobile, vengono misurati per mezzo di scanner 3D a luce strutturata con diversi range di inquadratura e risoluzione.
Tali sistemi, se opportunamente combinati con le tecniche per punti discreti, garantiscono un’elevata accuratezza di misura anche su volumi di svariati metri.
Il formato di uscita standard di una scansione tridimensionale a campo intero è generalmente una mesh poligonale.
SCANSIONI 3D LASER
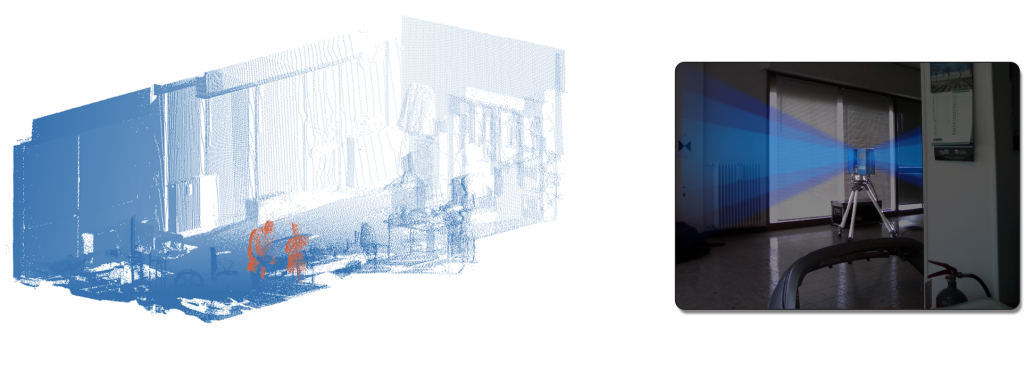
I particolari di più grandi dimensioni, quali imbarcazioni, edifici o aeromobili, vengono rilevati più velocemente e facilmente con sistemi laser a media o lunga gittata.
Il formato di uscita standard di una scansione 3D laser può essere una nuvola di punti o una mesh poligonale.
SCANSIONE TRIDIMENSIONALE IN TEMPO REALE
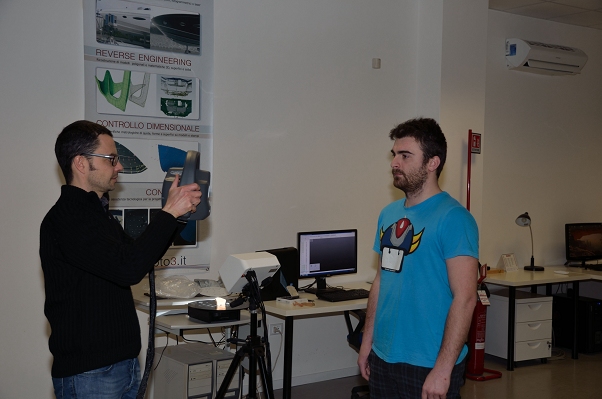
Particolari in leggero movimento o che richiedono acquisizioni veloci e/o con colore, sono scansionabili più facilmente con sistemi Real-Time.
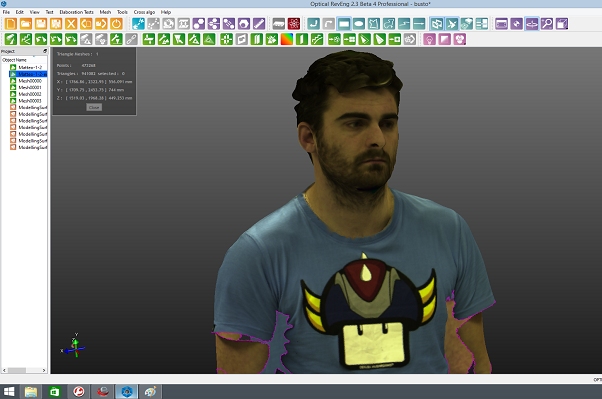
I sistemi 3D in tempo reale generano modelli in mesh poligonale con tempi notevolmente ridotti rispetto alle altre tecniche di misura.
Il formato di uscita standard di una scansione 3D in tempo reale è una mesh poligonale.
TOMOGRAFIA INDUSTRIALE
Nei casi in cui l’oggetto presenta delle cavità interne,
la scansione tomografica è in grado di restituire informazioni non ricavabili con altre tecniche non distruttive.
I volumi interni vengono rilevati senza dover “tagliare” l’oggetto, conservando in questo modo la sua integrità.
OPTO3 la utilizza principalmente in 2 campi specifici:
– Analisi Dimensionale di tipo tridimensionale o per sezioni bidimensionali.
Vengono controllate sia la forma geometrica che le quote metrologiche sia esterne che interne del particolare.
– Reverse Engineering con ricostruzione del modello matematico delle superfici esterne ma anche e soprattutto dei volumi interni.